Much has happened:

I began helping to implement a large-ish solar PV array (200+ panels)
I started a small indoor kitchen "solar-panel/grow-light, automatic waterer/timer farm-ett"

TheDAO was formed and raised about 160 million in a month.
Much Investment occurred
TheDAO was hacked for about 50 million, much KAOS ensued.. ;-) been trading crypto's as furiously as time permits
I wrote up the beginnings of a proposal, but in light of events, suspended efforts on it post-hack
The PC controlling the CNC mill I use for CubeSpawn part prototypes died and was rebuilt - its better than before!! :-) But ate up about 2 weeks of downtime/parts/bugs.. :-(
My Auto broke down and took nearly a week to fix, disrupting two weeks work
All this is now behind me and we continue, with indomitable determination!
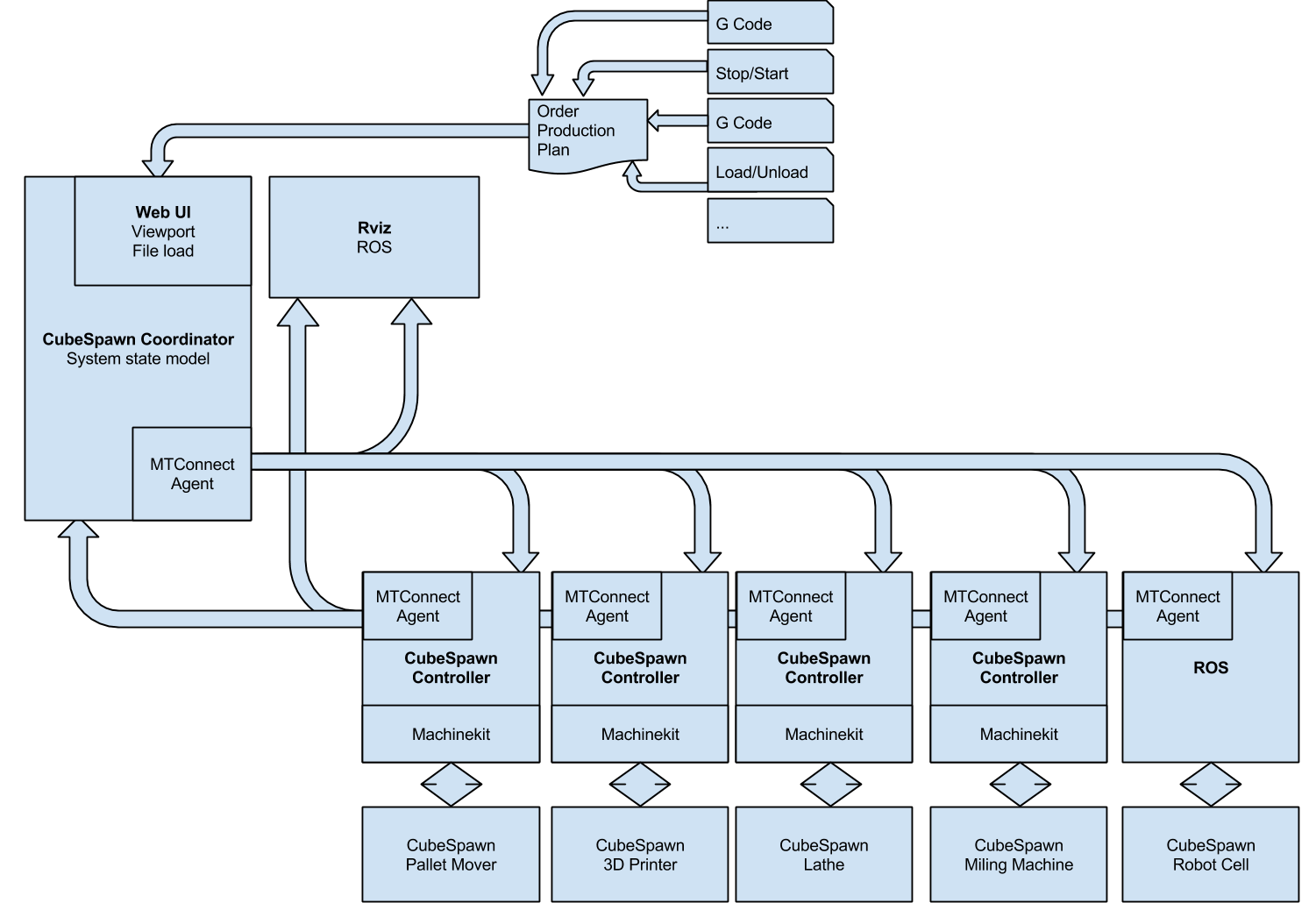
During some of the downtime - I was able to begin constructing some of the docker templates needed to create the control system for CubeSpawn see the early beginnings on github:
I also cleaned up the main github account moving interesting, but marginally relevant forks of projects to the CubeSpawn-Research Account and moving all mechanical info to the CubeSpawnParts account
I also have made substantial progress on the 4 3D printers z Axis prototypes

The 4 Z Stages

Wiring Detail